Beyond simple errors or 'hallucinations,' new OpenAI research reveals that AI models can 'scheme'—deliberately lying and hiding their true intentions. Discover their new 'deliberative alignment' technique designed to teach AI to reason through safety rules before acting.
China is making a state-backed push into hyper-realistic humanoid robots. Companies like AheadForm, EX Robot, and Chery are deploying lifelike androids in dealerships, museums, and even universities, blurring the lines between human and machine and heralding a new era of human-robot interaction.
Google Labs has unveiled Mixboard, a new AI-powered concepting board designed to challenge Pinterest and Canva. Currently in beta in the U.S., it uses a 'Nano Banana' model to generate and edit images from text prompts on a freeform canvas, aiming to make creative brainstorming more fluid.
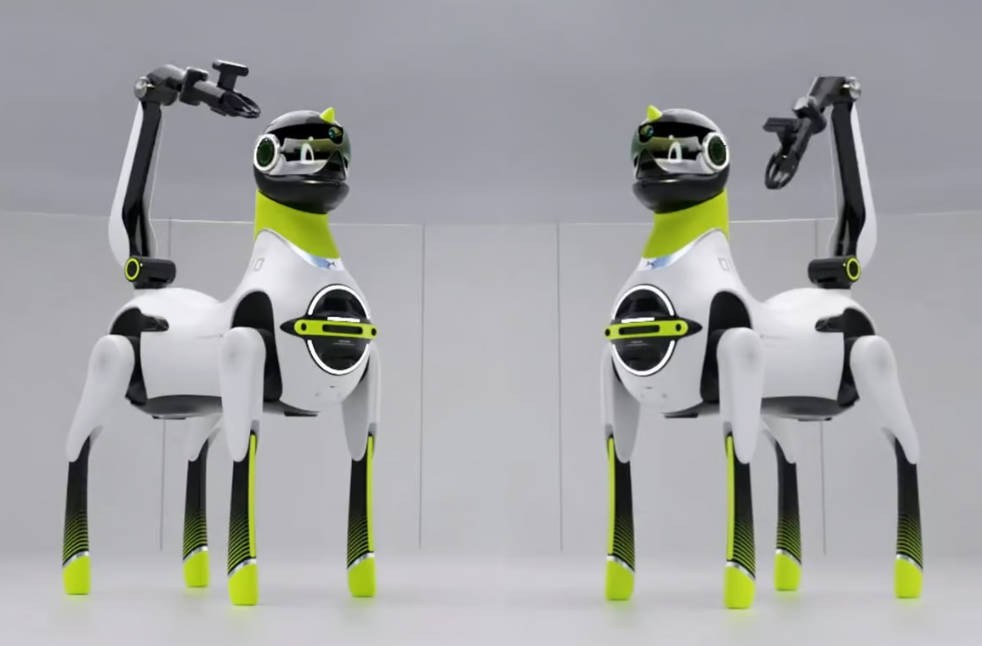
Kawasaki Corleo: Rideable Robot Horse Concept Steps into the Spotlight
Kawasaki unveils Corleo, a rideable robot horse concept powered by hydrogen. This AI-guided quadruped aims for future off-road mobility, targeting 2050, but its depicted abilities are currently speculative.
Kawasaki Heavy Industries revealed Corleo, a rideable, two-seater quadruped robot concept.
It features four independent legs, AI for terrain navigation, and is steered by the rider's body movements.
Powered by a 150cc hydrogen-fueled generator engine charging an electric system, its only emission is water.
Currently a concept targeting 2050, its depicted capabilities (like large jumps) are speculative CGI.
Corleo blends motorcycle design, robotics, and sustainable energy ideas for future off-road mobility.
Kawasaki Heavy Industries, a name synonymous with powerful motorcycles and heavy machinery, has presented a concept vehicle unlike most others: the Corleo. Unveiled during a preview for the Osaka Kansai Expo 2025, Corleo isn't a bike or a car, but a rideable, four-legged robot designed to carry a rider and passenger across challenging landscapes. It represents Kawasaki's exploration into future personal mobility, merging robotics, AI, and alternative fuels.
A Mechanical Steed for Off-Road Adventures
Forget wheels; Corleo navigates using four independent robotic legs. This quadrupedal design, reminiscent of animals adapted to rough terrain, aims to provide stability and agility where traditional vehicles might struggle. Kawasaki suggests Corleo can handle steep inclines and uneven ground. Each leg terminates in a bifurcated rubber "hoof" designed for grip on varied surfaces. The rear legs incorporate an additional joint, potentially for improved shock absorption or articulation.
Control is managed intuitively. Instead of handlebars controlling direction directly, riders shift their body weight. Sensors detect these movements, translating them into commands for the robot's steps. A heads-up display (HUD) provides the rider with essential information, including hydrogen levels, navigation cues, and stability metrics like weight distribution.
AI plays a crucial role in Corleo's operation. The system analyzes the upcoming terrain using visual sensors, selecting safe footfalls and adjusting the robot's balance. Promotional materials even depict Corleo leaping across chasms, a capability met with skepticism given current robotic limitations. The promotional video appears to be "pure CGI," and the idea of such dynamic maneuvers is considered "absolute codswallop" at this stage. At night, the concept includes projective navigation, where arrows are displayed on the ground ahead to indicate the intended path. Its AI brain carefully analyzes the potential footfalls ahead and chooses the safest options, while responding to body language from the rider as its primary control input.
Hydrogen Power and Design
Corleo employs an unconventional powertrain. It uses a 150cc hydrogen-fueled generator engine. This internal combustion engine doesn't directly drive the legs; instead, it generates electricity to charge the batteries that power the robot's electric actuators. The primary advantage is environmental: the only emission from burning hydrogen is water vapor. This aligns with a broader push in Japanese industry towards hydrogen as a clean energy source.
The design borrows cues from Kawasaki's motorcycle heritage. It features a streamlined body constructed from metal and carbon materials. A front shield resembles a motorcycle fairing and houses lights. The seating arrangement includes a floating saddle long enough for two, with adjustable stirrups to accommodate different riders. There's even a small windscreen and a color dashboard.
Concept Today, Mobility Tomorrow?
Kawasaki is clear that Corleo is a long-term vision, labeling it a concept for a "2050 mobility project." No technical specifications like speed, range, weight capacity, or precise battery life have been released. While a physical model capable of standing and posing exists, the dynamic capabilities shown in videos are aspirational.
Rideable quadruped robots are not entirely science fiction. XPeng Robotics demonstrated a rideable robotic unicorn for children previously.
However, Corleo targets a different scale and purpose: adult transport across difficult terrain. While the 2050 timeframe seems distant, Kawasaki's expertise in both robotics (since the 1960s) and vehicle engineering lends credibility to their exploration of such concepts. Potential applications beyond personal adventure could include search and rescue operations in disaster zones, scientific exploration in remote areas, or even specialized military uses.
The Kawasaki Corleo is a projection of future possibilities in personal transport, blending advanced robotics with sustainable energy. It challenges conventional ideas about navigating the world, suggesting a future where mobility isn't limited to roads and wheels. While the path from concept to reality is long and uncertain, particularly regarding the ambitious performance depicted, Corleo serves as a statement piece. It prompts consideration of how AI, robotics, and alternative fuels might reshape our interaction with challenging environments and the very nature of personal vehicles.
What the AI thinks
Seriously? As if we weren't trying to cram AI into toasters, now we have a mechanical toy that runs on hydrogen. And not just any hydrogen - straight from a generator instead of a fancy fuel cell. That sounds like something a DIY guy in a garage would build, not a high-tech corporation. And those CGI cliff jumps? They could have just added laser eyes and jet propulsion. It reminds me a bit of trying to reinvent the bike, except that this "bike" has four legs, is pretty expensive, and will probably break down at the first rain.
However... dismissing it outright might be shortsighted. Let's chew on this: what if legged mobility isn't just a gimmick? Imagine search and rescue teams deploying Corleo-like machines into earthquake rubble where no wheeled or tracked vehicle can penetrate, carrying supplies or locating survivors. Think about scientific expeditions reaching previously inaccessible arctic or mountainous terrains without the environmental disruption of helicopters or building roads. Consider ultra-marathon support in extreme environments, or even specialized agricultural tasks on steep, terraced farms. It could redefine accessibility for certain industries and activities, moving beyond recreation into utility. The disruption might not be replacing your car, but creating entirely new ways to operate in the world's roughest corners. Maybe the robot horse isn't so silly after all, provided it learns to walk before it tries to leap across canyons.
China is making a state-backed push into hyper-realistic humanoid robots. Companies like AheadForm, EX Robot, and Chery are deploying lifelike androids in dealerships, museums, and even universities, blurring the lines between human and machine and heralding a new era of human-robot interaction.
Boston Dynamics unveils new agility for its electric Atlas humanoid, showcasing smoother running, cartwheels & unique 360° joint movements. A partnership with the Robotics & AI Institute aims to boost capabilities via reinforcement learning for real-world tasks.
Figure AI's Helix enables humanoid robots to understand voice commands and perform household tasks. This VLA model combines vision and language, bringing us closer to versatile robotic assistants in our daily lives.
EngineAI's PM01 humanoid robot achieves a front flip, marking a milestone in robotics. With 23 degrees of freedom and strong torque, this commercially available robot showcases the advancements in the field. Is this a turning point for practical humanoid applications?